What is CAN bus?
When talking about vehicle networking, you must have heard about the term “CAN bus”. What is CAN bus? How does it work?
What is CAN bus?
“CAN bus” stands for Controller Area Network Bus (CAN bus). It is a message-based protocol for serial communications in automobiles.
In the automobile industry, for the sake of security, comfortability and convenience, a variety of electronic control units (ECUs) have been produced. More advanced vehicles usually involve greater numbers of and more sophisticated ECUs, such as engine control units, airbags, ABS, electronic fuel injection systems, etc.

Those systems vary in data types and requirements for communication reliability. To accommodate those differences needs more buses, which may lead to increased wires on board. To address the needs of reduced number of wires and large volumes of fast communications via multiple LANs, in 1986, BOSCH, a company known for developing and producing automobile electronics, developed the CAN bus protocol for vehicles. CAN bus was later standardized through ISO11898 and ISO11519, and is now a standardized protocol in Europe for vehicle networks.
How does CAN bus work?
Sensors installed around the vehicle are constantly monitoring the vehicle status and send the data to respective control units. For instance, data of air pressure, engine temperature, engine velocity collected by the sensors reach the control unit of the engine, which, though analysis and processing, sends commands to control the amount of fuel to be injected.
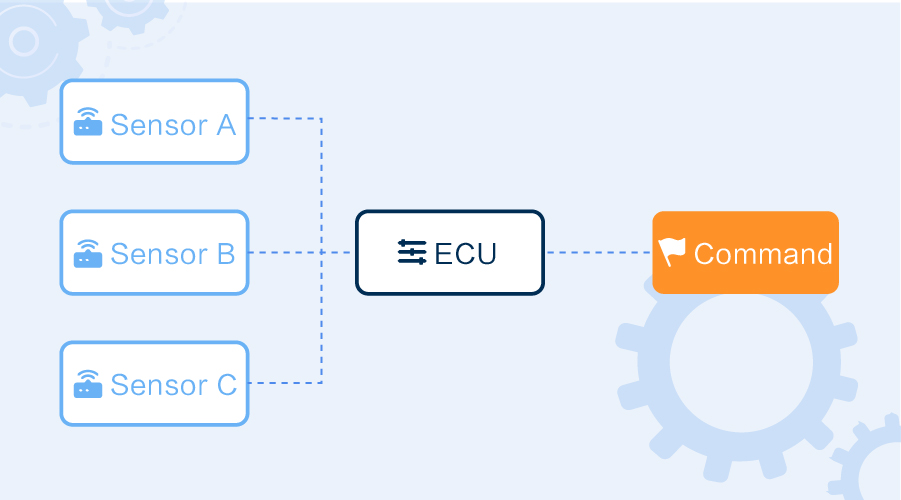
ECUs on board do not work independently. Instead, they need to share information in order to better collaborate. This implies requirements for data transmission.
Generally, communication between ECUs is carried out in two ways.
First, each single message is transmitted through independent cables. For example, if 5 signals need to be exchanged between two control units, then 5 independent cables are needed. More messages mean more wires and more pins between ECUs.
Second, all messages between ECUs are transmitted through two cables. In this way, all messages, regardless of their sizes, can move through the two cables.
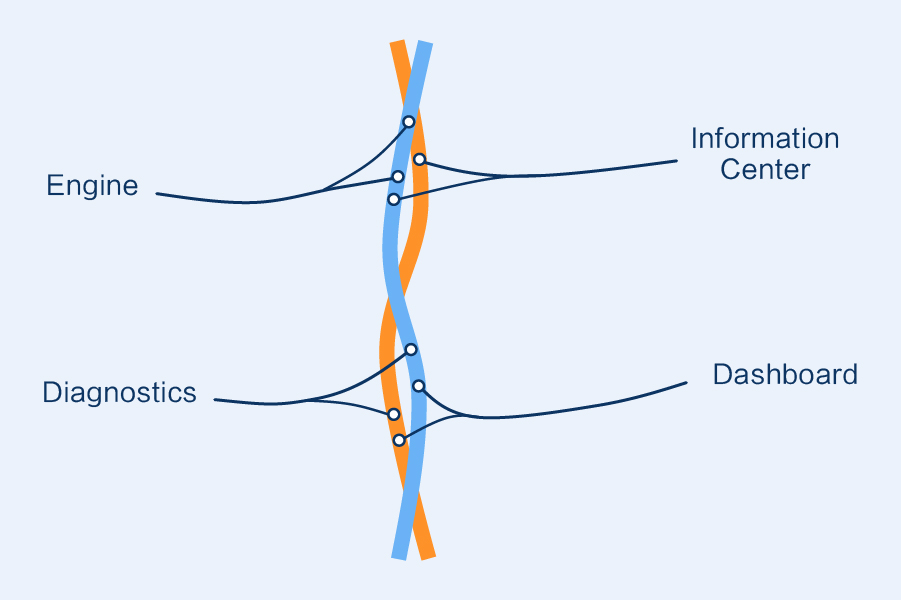
Such cables are called CAN bus.
The CAN bus is a broadcast type of bus without a host computer. All nodes can “hear” all transmissions invariably and there is no way to send a message to a particular node – unless with special settings.
CAN bus vs. OBD
Sometimes you may see another word accompanying CAN bus – OBD. Then what is OBD? What’s the difference between CAN bus and OBD?
OBD is short for On-board Diagnostics, which is a standard set by Europe and the US used to monitor automobile systems related to emissions (e.g. engines and gearboxes). OBD defines the formats of diagnostic services and data transmissions that should be supported by related systems and helps record faults and alert the vehicle owner.
Data transmission of OBD needs to be supported by an underlying data link. This link can be either CAN bus or other types of buses like K bus.
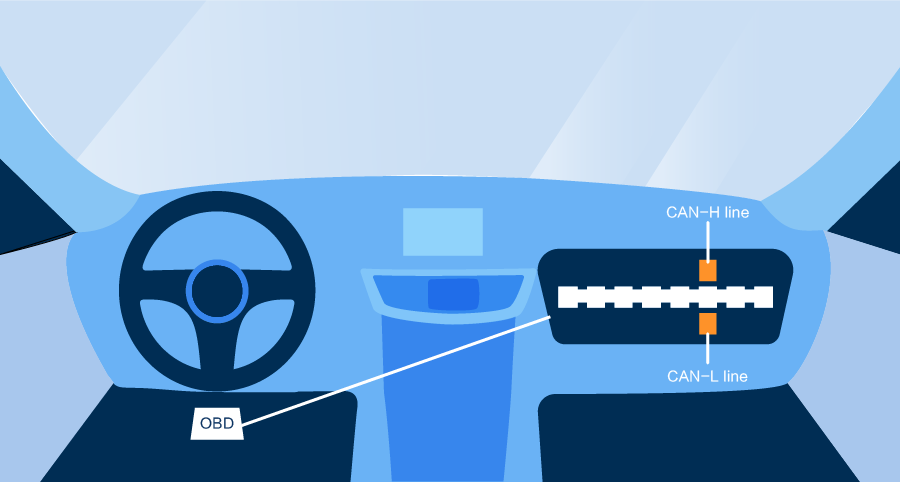
You see? CAN bus is the underlying data link for in-vehicle controller LAN communication, while OBD is an auto-diagnostic system that operates based on CAN bus.
What is special about CAN bus?
Special features of in-vehicle environments lead to high requirements for usability, reliability and costs of communication systems. The CAN bus standard is widely applied in all vehicles and many other machines due to the following benefits:
Simple and low cost
As is said above, all ECUs can communicate via two CAN bus wires instead of complex analog signal lines, which reduces errors, weight, wiring and costs.
Fully centralized
The CAN bus provides ‘one point-of-entry’ to communicate with all network ECUs – enabling central diagnostics, data logging and configuration.
Extremely robust
The CAN bus system is ruggedized enough for electric disturbances and electromagnetic interference. This makes it able to be installed in a wide range of vehicles including safety critical applications.
Efficient
Communication within the CAN bus system is prioritized by ID. Top priority data gets immediate bus access without causing interruption of others.
Easy deployment
The CAN bus is a proven standard with a rich support ecosystem, making it easily installed on various vehicles.
Applications of CAN bus
Built with excellent control and fault detection capabilities, CAN bus is an ideal protocol for vehicle diagnostics. Actually, their adoption goes far beyond that to nearly every industry.
